Introduction to tutorial 17
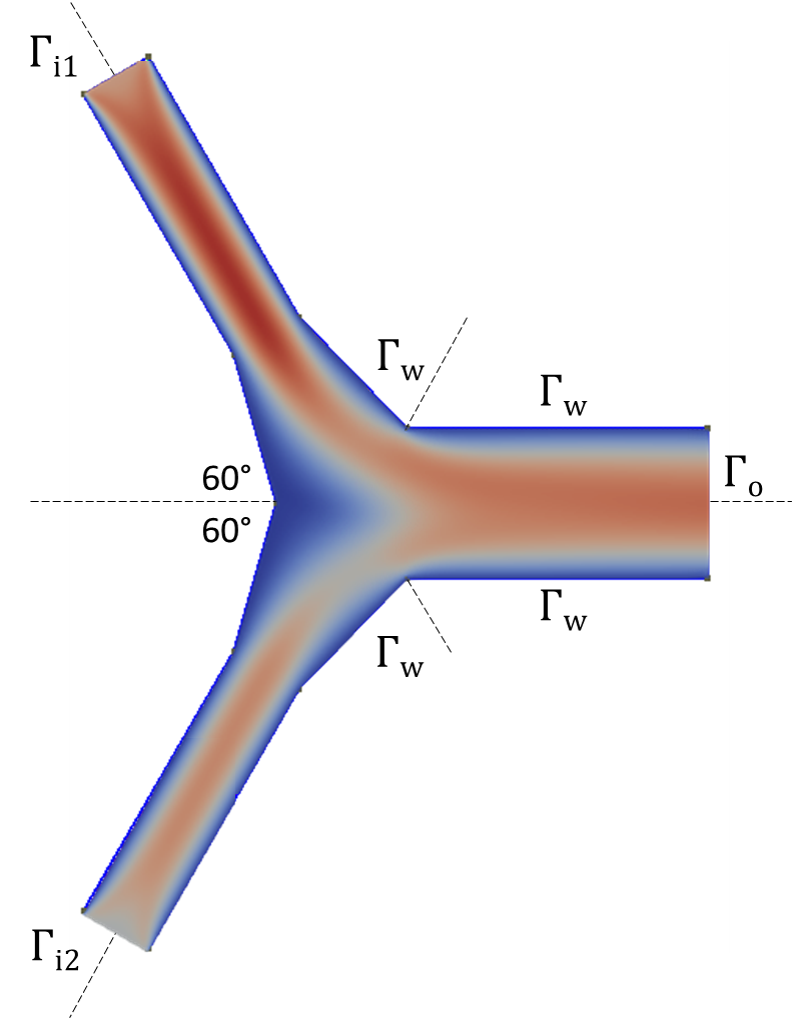
In this tutorial, we contruct a reduced order model for a Y-junction flow problem. The Y-junction consists of two inlets and one outlet channel whose time-dependent inlet boundary conditions are controlled. The angle between each inlet and the horizontal axis is 60 degrees. The length of the channels is 2 m. The two inlets, \(\Gamma_{i1}\) and \(\Gamma_{i2}\), have a width of 0.5 m, while the outlet, \(\Gamma_{o}\), has a width of 1 m. The kinematic viscosity is equal to \(\nu\) = 0.01 m \(^2\)/s and the flow is considered laminar. As initial conditions the steady state solution, obtained with the simpleFOAM-solver, for a velocity magnitude of 1 m/s at both inlets is chosen. In this tutorial, new values of the velocity magnitude of the flow at the inlets are imposed in the reduced order model with either an iterative penalty method or a lifting function method. The reduced order model is constructed using Galerkin projection approach together with an exploitation of a pressure Poisson equation during the projection stage.
The following image depicts a sketch of the geometry of the two-dimensional Y-junction.
A detailed look into the code
In this section we explain the main steps necessary to construct the tutorial N°17.
The necessary header files
First of all let's have a look at the header files that need to be included and what they are responsible for.
The header files of ITHACA-FV necessary for this tutorial are: <unsteadyNS.H> for the full order unsteady NS problem, <ITHACAPOD.H> for the POD decomposition, <reducedUnsteadyNS.H> for the construction of the reduced order problem, and finally <ITHACAstream.H> for some ITHACA input-output operations.
Header file of the ITHACAPOD class.
Header file of the ITHACAstream class, it contains the implementation of several methods for input ou...
Header file of the reducedUnsteadyNS class.
Header file of the unsteadyNS class.
Definition of the tutorial17 class
We define the tutorial17 class as a child of the unsteadyNS class.
Implementation of a parametrized full order unsteady NS problem and preparation of the the reduced ...
{
public:
:
{}
autoPtr< volVectorField > _U
Velocity field.
tutorial17(int argc, char *argv[])
unsteadyNS()
Construct Null.
Inside the tutorial17 class we define the offlineSolve method according to the specific problem that needs to be solved. If the offline solve has been previously performed then the method just reads the existing snapshots from the Offline directory. Otherwise it performs the offline solve.
{
List<scalar> mu_now(1);
{
}
bool offline
Boolean variable, it is 1 if the Offline phase has already been computed, else 0.
PtrList< volScalarField > Pfield
List of pointers used to form the pressure snapshots matrix.
PtrList< volVectorField > Ufield
List of pointers used to form the velocity snapshots matrix.
void read_fields(PtrList< GeometricField< Type, PatchField, GeoMesh > > &Lfield, word Name, fileName casename, int first_snap, int n_snap)
Function to read a list of fields from the name of the field and casename.
else
{
}
Eigen::MatrixXd mu
Row matrix of parameters.
void truthSolve()
Perform a TruthSolve.
}
We also define a liftSolve method, which will be needed to construct the lifting functions if the lifting function method is used:
void liftSolve()
Perform a lift solve.
{
{
IOMRFZoneList& MRF =
_MRF();
volVectorField Ulift(
"Ulift" + name(k),
U);
instantList Times =
runTime.times();
pisoControl potentialFlow(
mesh,
"potentialFlow");
Info << "Solving a lifting Problem" << endl;
Vector<double> v1(0, 0, 0);
v1[0] = BCs(0, k);
v1[1] = BCs(1, k);
Vector<double>
v0(0, 0, 0);
for (label j = 0; j <
U.boundaryField().size(); j++)
{
if (j == BCind)
{
}
else if (
U.boundaryField()[BCind].type() ==
"fixedValue")
{
}
else
{
}
phi = linearInterpolate(Ulift) &
mesh.Sf();
}
Info << "Constructing velocity potential field Phi\n" << endl;
volScalarField Phi
(
IOobject
(
"Phi",
IOobject::READ_IF_PRESENT,
IOobject::NO_WRITE
),
dimensionedScalar("Phi", dimLength * dimVelocity, 0),
p.boundaryField().types()
);
label PhiRefCell = 0;
scalar PhiRefValue = 0;
(
Phi,
potentialFlow.dict(),
PhiRefCell,
PhiRefValue
);
mesh.setFluxRequired(Phi.name());
while (potentialFlow.correctNonOrthogonal())
{
fvScalarMatrix PhiEqn
(
fvm::laplacian(dimensionedScalar("1", dimless, 1), Phi)
==
);
PhiEqn.setReference(PhiRefCell, PhiRefValue);
PhiEqn.solve();
if (potentialFlow.finalNonOrthogonalIter())
{
}
}
Info << "Continuity error = "
<< mag(fvc::div(
phi))().weightedAverage(
mesh.V()).value()
<< endl;
Ulift = fvc::reconstruct(
phi);
Ulift.correctBoundaryConditions();
Info << "Interpolated velocity error = "
<< (sqrt(sum(sqr((fvc::interpolate(
U) &
mesh.Sf()) -
phi)))
/ sum(
mesh.magSf())).value()
<< endl;
Ulift.write();
volVectorField Uzero
(
IOobject
(
"Uzero",
IOobject::NO_READ,
IOobject::AUTO_WRITE
),
dimensionedVector(
"zero",
U.dimensions(), vector::zero)
);
volVectorField Uliftx("Uliftx" + name(k), Uzero);
Uliftx.replace(0, Ulift.component(0));
Uliftx.write();
volVectorField Ulifty("Ulifty" + name(k), Uzero);
Ulifty.replace(1, Ulift.component(1));
Ulifty.write();
Eigen::MatrixXi inletPatch
Matrix that contains informations about the inlet boundaries without specifing the direction Rows = N...
void assignBC(volVectorField &s, label BC_ind, Vector< double > &value)
Assign Boundary Condition to a volVectorField.
void assignIF(T &s, G &value)
Assign internal field condition.
autoPtr< Time > _runTime
Time.
autoPtr< fvMesh > _mesh
Mesh.
PtrList< volVectorField > liftfield
List of pointers used to form the list of lifting functions.
setRefCell(p, mesh.solutionDict().subDict("SIMPLE"), pRefCell, pRefValue)
}
}
Definition of the main function
In this section we show the definition of the main function. First we construct the object "example" of type tutorial17:
Next, we specify the name of the file that contains the values at the boundary for the full order solver for each time step. The inlet velocity magnitude of, alternately, inlet 1 or 2 is increased or decreased linearly over time between 1.0 m/s to 0.5 m/s.
word par_offline_BC("./timeBCoff");
The input file only contains the boundary values at inlet 1 and 2 in the x-direction and y-direction. We are storing these values in an matrix together with zero velocity in the z-direction since it is required to specify the velocity in the x,y and z direction even though the problem is two-dimensional.
List< Eigen::MatrixXd > readMatrix(word folder, word mat_name)
Read a three dimensional matrix from a txt file in Eigen format.
Eigen::MatrixXd timeBCoff3D = Eigen::MatrixXd::Zero(6, timeBCoff2D.cols());
timeBCoff3D.row(0) = timeBCoff2D.row(0);
timeBCoff3D.row(1) = timeBCoff2D.row(1);
timeBCoff3D.row(3) = timeBCoff2D.row(2);
timeBCoff3D.row(4) = timeBCoff2D.row(3);
example.timeBCoff = timeBCoff3D;
We also load the new inlet velocities for the reduced order solver from a text file and store the values in a matrix.
Eigen::MatrixXd par_on_BC;
word par_online_BC("./timeBCon");
Then we parse the ITHACAdict file to determine the number of modes to be written out and also the ones to be used for projection of the velocity and pressure:
Class for the definition of some general parameters, the parameters must be defined from the file ITH...
static ITHACAparameters * getInstance()
Gets an instance of ITHACAparameters, to be used if the instance is already existing.
example._runTime());
int NmodesUout =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesUout", 15);
int NmodesPout =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesPout", 15);
int NmodesSUPout =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesSUPout", 15);
int NmodesUproj =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesUproj", 10);
int NmodesPproj =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesPproj", 10);
int NmodesSUPproj =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesSUPproj", 10);
we note that a default value can be assigned in case the parser did not find the corresponding string in the ITHACAdict file.
In our implementation, the viscocity needs to be defined by specifying that Nparameters=1, Nsamples=1, and the parameter ranges from 0.01 to 0.01 equispaced, i.e.
example.Pnumber = 1;
example.Tnumber = 1;
example.setParameters();
example.mu_range(0, 0) = 0.01;
example.mu_range(0, 1) = 0.01;
example.genEquiPar();
After that we set the inlet boundaries where we have the non homogeneous BC
example.inletIndex.resize(4, 2);
example.inletIndex(0, 0) = 1;
example.inletIndex(0, 1) = 0;
example.inletIndex(1, 0) = 1;
example.inletIndex(1, 1) = 1;
example.inletIndex(2, 0) = 2;
example.inletIndex(2, 1) = 0;
example.inletIndex(3, 0) = 2;
example.inletIndex(3, 1) = 1;
as well as the patch number of inlet 1 and the patch number of inlet 2.
example.inletPatch.resize(2, 1);
example.inletPatch(0, 0) = example.inletIndex(0, 0);
example.inletPatch(1, 0) = example.inletIndex(2, 0);
We set the parameters for the time integration, so as to simulate 12.0 seconds of simulation time, with a step size = 0.0005 seconds, and the data are dumped every 0.03 seconds, i.e.
example.startTime = 0;
example.finalTime = 12;
example.timeStep = 0.0005;
example.writeEvery = 0.03;
Now we are ready to perform the offline stage:
After that, the modes for the velocity and pressure are obtained. The lifting function method requires the velocity modes to be homogeneous. Therefore we differentiate here between the lifting function method and the penalty method. Which bcMethod to be used can be specified in the ITHACAdict file.
In the case of the lifting function method, we specify first a unit value onto the inlet patches in the x- and y-direction
if (example.bcMethod == "lift")
{
Eigen::MatrixXd BCs;
BCs.resize(2, 2);
BCs(0, 0) = 1;
BCs(1, 0) = -1;
BCs(0, 1) = 1;
BCs(1, 1) = 1;
Then we solve for the lifting functions; one lifting function for each inlet boundary condition and direction
The lifting functions are normalized
void normalizeFields(PtrList< GeometricField< Type, fvPatchField, volMesh > > &fields)
Normalize list of Geometric fields.
and the velocity snapshots are homogenized by subtracting the normalized lifting functions from the velocity snapshots.
example.computeLift(example.Ufield, example.liftfield, example.Uomfield);
Finally, we obtain the homogeneous velocity modes
void getModes(PtrList< GeometricField< Type, PatchField, GeoMesh > > &snapshots, PtrList< GeometricField< Type, PatchField, GeoMesh > > &modes, word fieldName, bool podex, bool supex, bool sup, label nmodes, bool correctBC)
Computes the bases or reads them for a field.
example.podex, 0, 0,
NmodesUout);
and the pressure modes.
example.podex, 0, 0,
NmodesPout);
}
If the penalty method is used, the velocity and pressure modes are computed as follows
else if (example.bcMethod == "penalty")
{
example.podex, 0, 0,
NmodesUout);
example.podex, 0, 0,
NmodesPout);
}
Then the projection onto the POD modes is performed using the Pressure Poisson Equation (PPE) approach.
example.projectPPE("./Matrices", NmodesUproj, NmodesPproj, NmodesSUPproj);
Now that we obtained all the necessary information from the POD decomposition and the reduced matrices, we are ready to construct the dynamical system for the reduced order model (ROM). We proceed by constructing the object "reduced" of type reducedUnsteadyNS:
Class where it is implemented a reduced problem for the unsteady Navier-stokes problem.
And then we can use the constructed ROM to perform the online procedure, from which we can simulate the problem for new values of the inlet velocities that vary linearly over time. We are keeping the time stepping the same as for the offline stage, but the ROM simulation (online stage) is performed for a longer time period.
reduced.nu = 0.01;
reduced.tstart = 0;
reduced.finalTime = 18;
reduced.dt = 0.0005;
reduced.storeEvery = 0.0005;
reduced.exportEvery = 0.03;
We have to specify a new value for the inlet velocities, which were already loaded from a text file
Eigen::MatrixXd vel_now = par_on_BC;
If the penalty method is used, we also have to set the parameters for the iterative penalty method to determine a suitable penalty factor
if (example.bcMethod == "penalty")
{
reduced.maxIterPenalty = 100;
reduced.tolerancePenalty = 1e-5;
reduced.timeStepPenalty = 5;
reduced.tauIter = Eigen::MatrixXd::Zero(4, 1);
reduced.tauIter << 1e-6, 1e-6, 1e-6, 1e-6;
reduced.tauU = reduced.penalty_PPE(vel_now, reduced.tauIter);
}
and then the online solve is performed.
reduced.solveOnline_PPE(vel_now);
Finally the ROM solution is reconstructed. In the case the solution should be exported and exported, put true instead of false in the function:
reduced.reconstruct(false, "./ITHACAoutput/Reconstruction/");
The plain program
Here there's the plain code
#include <chrono>
#include <math.h>
#include <iomanip>
{
public:
:
{}
{
List<scalar> mu_now(1);
{
}
else
{
}
}
{
{
IOMRFZoneList& MRF =
_MRF();
volVectorField Ulift(
"Ulift" + name(k),
U);
instantList Times =
runTime.times();
pisoControl potentialFlow(
mesh,
"potentialFlow");
Info << "Solving a lifting Problem" << endl;
Vector<double> v1(0, 0, 0);
v1[0] = BCs(0, k);
v1[1] = BCs(1, k);
Vector<double>
v0(0, 0, 0);
for (label j = 0; j <
U.boundaryField().size(); j++)
{
if (j == BCind)
{
}
else if (
U.boundaryField()[BCind].type() ==
"fixedValue")
{
}
else
{
}
phi = linearInterpolate(Ulift) &
mesh.Sf();
}
Info << "Constructing velocity potential field Phi\n" << endl;
volScalarField Phi
(
IOobject
(
"Phi",
IOobject::READ_IF_PRESENT,
IOobject::NO_WRITE
),
dimensionedScalar("Phi", dimLength * dimVelocity, 0),
p.boundaryField().types()
);
label PhiRefCell = 0;
scalar PhiRefValue = 0;
(
Phi,
potentialFlow.dict(),
PhiRefCell,
PhiRefValue
);
mesh.setFluxRequired(Phi.name());
while (potentialFlow.correctNonOrthogonal())
{
fvScalarMatrix PhiEqn
(
fvm::laplacian(dimensionedScalar("1", dimless, 1), Phi)
==
);
PhiEqn.setReference(PhiRefCell, PhiRefValue);
PhiEqn.solve();
if (potentialFlow.finalNonOrthogonalIter())
{
}
}
Info << "Continuity error = "
<< mag(fvc::div(
phi))().weightedAverage(
mesh.V()).value()
<< endl;
Ulift = fvc::reconstruct(
phi);
Ulift.correctBoundaryConditions();
Info << "Interpolated velocity error = "
<< (sqrt(sum(sqr((fvc::interpolate(
U) &
mesh.Sf()) -
phi)))
/ sum(
mesh.magSf())).value()
<< endl;
Ulift.write();
volVectorField Uzero
(
IOobject
(
"Uzero",
IOobject::NO_READ,
IOobject::AUTO_WRITE
),
dimensionedVector(
"zero",
U.dimensions(), vector::zero)
);
volVectorField Uliftx("Uliftx" + name(k), Uzero);
Uliftx.replace(0, Ulift.component(0));
Uliftx.write();
volVectorField Ulifty("Ulifty" + name(k), Uzero);
Ulifty.replace(1, Ulift.component(1));
Ulifty.write();
}
}
};
int main(
int argc,
char* argv[])
{
word par_offline_BC("./timeBCoff");
Eigen::MatrixXd timeBCoff3D = Eigen::MatrixXd::Zero(6, timeBCoff2D.cols());
timeBCoff3D.row(0) = timeBCoff2D.row(0);
timeBCoff3D.row(1) = timeBCoff2D.row(1);
timeBCoff3D.row(3) = timeBCoff2D.row(2);
timeBCoff3D.row(4) = timeBCoff2D.row(3);
example.timeBCoff = timeBCoff3D;
Eigen::MatrixXd par_on_BC;
word par_online_BC("./timeBCon");
example._runTime());
int NmodesUout =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesUout", 15);
int NmodesPout =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesPout", 15);
int NmodesSUPout =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesSUPout", 15);
int NmodesUproj =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesUproj", 10);
int NmodesPproj =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesPproj", 10);
int NmodesSUPproj =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesSUPproj", 10);
int NmodesOut =
para->ITHACAdict->lookupOrDefault<
int>(
"NmodesOut", 20);
example.Pnumber = 1;
example.Tnumber = 1;
example.setParameters();
example.mu_range(0, 0) = 0.01;
example.mu_range(0, 1) = 0.01;
example.genEquiPar();
example.inletIndex.resize(4, 2);
example.inletIndex(0, 0) = 1;
example.inletIndex(0, 1) = 0;
example.inletIndex(1, 0) = 1;
example.inletIndex(1, 1) = 1;
example.inletIndex(2, 0) = 2;
example.inletIndex(2, 1) = 0;
example.inletIndex(3, 0) = 2;
example.inletIndex(3, 1) = 1;
example.inletPatch.resize(2, 1);
example.inletPatch(0, 0) = example.inletIndex(0, 0);
example.inletPatch(1, 0) = example.inletIndex(2, 0);
example.startTime = 0;
example.finalTime = 12;
example.timeStep = 0.0005;
example.writeEvery = 0.03;
example.offlineSolve();
if (example.bcMethod == "lift")
{
Eigen::MatrixXd BCs;
BCs.resize(2, 2);
BCs(0, 0) = 1;
BCs(1, 0) = -1;
BCs(0, 1) = 1;
BCs(1, 1) = 1;
example.liftSolve(BCs);
example.computeLift(example.Ufield, example.liftfield, example.Uomfield);
example.podex, 0, 0,
NmodesUout);
example.podex, 0, 0,
NmodesPout);
}
else if (example.bcMethod == "penalty")
{
example.podex, 0, 0,
NmodesUout);
example.podex, 0, 0,
NmodesPout);
}
example.projectPPE("./Matrices", NmodesUproj, NmodesPproj, NmodesSUPproj);
reduced.nu = 0.01;
reduced.tstart = 0;
reduced.finalTime = 18;
reduced.dt = 0.0005;
reduced.storeEvery = 0.0005;
reduced.exportEvery = 0.03;
Eigen::MatrixXd vel_now = par_on_BC;
if (example.bcMethod == "penalty")
{
reduced.maxIterPenalty = 100;
reduced.tolerancePenalty = 1e-5;
reduced.timeStepPenalty = 5;
reduced.tauIter = Eigen::MatrixXd::Zero(4, 1);
reduced.tauIter << 1e-6, 1e-6, 1e-6, 1e-6;
reduced.tauU = reduced.penalty_PPE(vel_now, reduced.tauIter);
}
reduced.solveOnline_PPE(vel_now);
reduced.reconstruct(false, "./ITHACAoutput/Reconstruction/");
exit(0);
}
autoPtr< surfaceScalarField > _phi
Flux.
autoPtr< IOMRFZoneList > _MRF
MRF variable.
autoPtr< volScalarField > _p
Pressure field.
 1.13.2
1.13.2
